
C. Plasberg; A. Roennau; R. Dillmann
- Abstract:
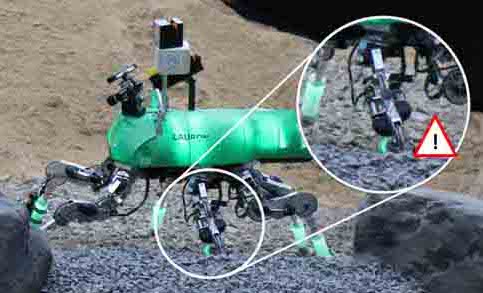
Robots are brought to more and more remote locations. Not only worldwide, but also in- and outside our solar system. They have proven to be a great tool to get tasks done without endangering humans in life-hostile environments. One downside of those environments and locations is the impossibility of repairs and mechanical maintenance. Inspired by insects and other walking forms of life this work uses the redundancy of a six-legged robot to increase mobility in case of damages. Without detaching any parts of the robot it is reconfigured to minimize the impact of damage and remains walking sparing one leg. A statically stable position is hold at all times so potential cargo is always kept safe. The method is implemented and tested with the six-legged walking robot LAURON V.