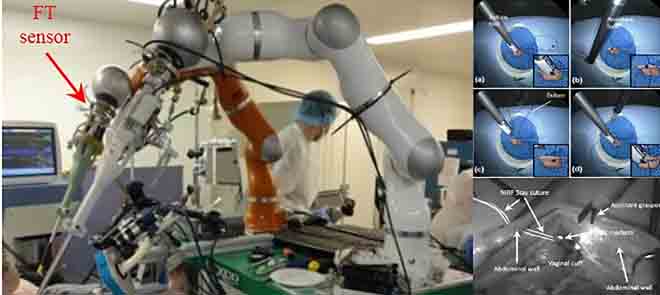
Vaginal Cuff Closure With Dual-Arm Robot and Near-Infrared Fluorescent Sutures
Simon Leonard; Justin Opfermann; Nicholas Uebele; Lydia Carroll; Ryan Walter; Christopher Bayne; Jiawei Ge; Axel Krieger Abstract: This paper presents a dual-arm suturing robot. We extend the […]